

东南大学数字医学工程全国重点实验室/生物科学与医学工程学院POCT课题组刘宏研究员与马标博士在国际著名学术期刊《Advanced Science》在线发表标题为“Soft Robots with Plant-Inspired Gravitropism Based on Fluidic Liquid Metal”的最新研究成果。受植物向重性启发,研究人员将液态金属与智能热响应液晶弹性体结合,构建了无电子控制的仿生智能软体机器人。
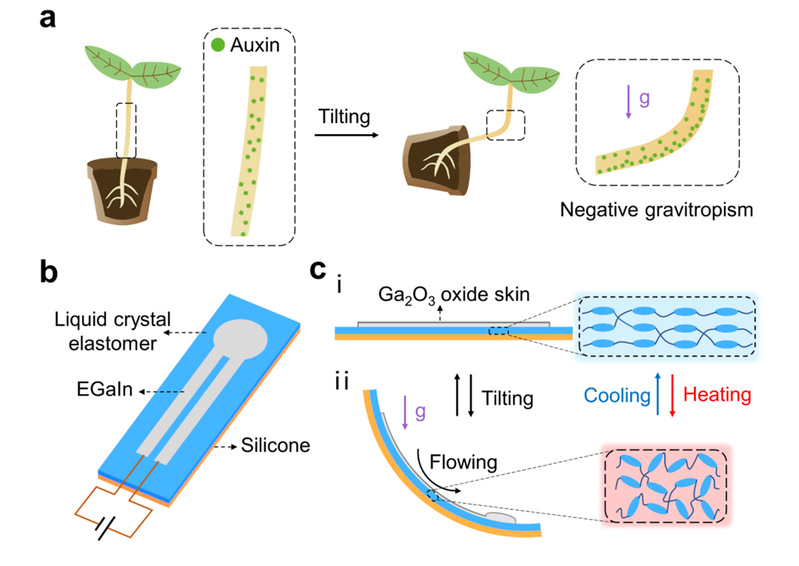
相比传统的刚体机器人,基于柔性智能材料构筑的软体机器人具有更高的运动自由度、更好的环境共融性和交互安全性,在可穿戴设备、智能人机交互、医疗手术等诸多领域有着广泛的应用前景。然而,软体机器人的运动通常依赖于人工调制的激励。在自然界中,植物在无神经系统的控制下,仅仅通过自身巧妙的组成即可对无处不在的重力进行自主形变反馈。受此启发,研究人员利用液态金属在其纳米氧化层内的流动性和电热特性,构建了具有重力感知能力的智能仿生软体机器人。通过改变液态金属软体机器人的空间姿态,实现对其电阻和电热响应的可控编程,进而赋予其类植物重力适应性。基于这一机制,作者进一步设计了可交互的柔性抓手和具有地形感知能力的自振荡爬行机器人。该工作为能够感知重力和加速度的类生命软机器的构筑提供了新的思路。
东南大学生物科学与医学工程学院博士研究生陈刚胜为第一作者,至善博士后马标为共同第一作者,刘宏研究员和马标博士为共同通讯作者。该工作得到了江苏省自然科学基金、江苏省重点研发计划、中国博士后科学基金等项目资助。
文章链接:https://doi.org/10.1002/advs.202306129

